╚╦ą╬ÖCŲ„╚╦śŗ│╔Ż║╚²┤¾─ŻēKŻ¼▄ø╝■┼cė▓╝■Į╗╗ź
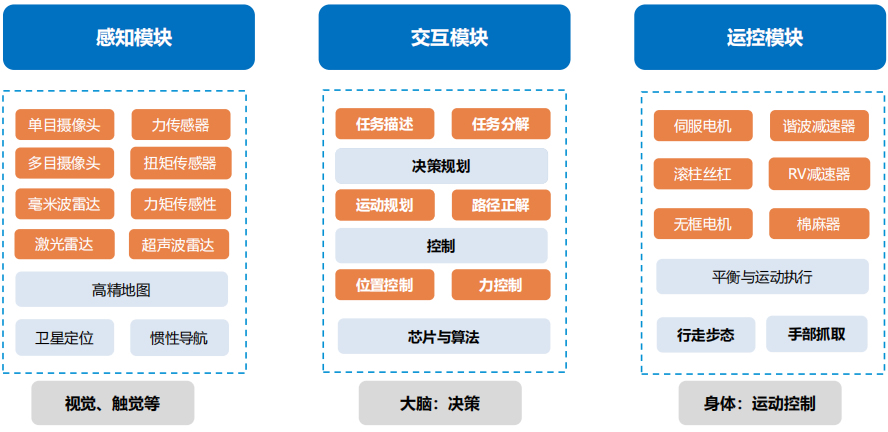
Ī¶ Ėąų¬─ŻēKŻ║░³└©ā╔ĘĮ├µęĢėX║═ė|ėXŻ¼ęĢėXėą╝āęĢėX┬ĘŠĆŻ¼ę▓ėąę└┐┐└ū▀_Ą╚ČÓĘĮ╩Į╚┌║Ž┬ĘŠĆŻ¼ęį▒ŃČŃ▒▄šŽĄKĪó
ęÄäØ┬ĘŠĆŻ╗ė|ėXų„ę¬═©▀^é„ĖąŲ„┼ąöÓ╬’¾wĄ─ųž┴┐Īó╠žąįĄ╚Ż¼ęį▒ŃĖ³║├īŹąąäėū„┐žųŲĪŻ
Ī¶ øQ▓▀─ŻēKŻ║╩ŪÖCŲ„╚╦Ą─┤¾─XŻ¼║╦ą─╩ŪąŠŲ¼┼c╦ŃĘ©Ż¼×ķ▌ö╚ļĄ─╚╬äš▀MąąĘųĮŌĪóųŲČ©╝čøQ▓▀ęÄäØŻ¼▓óĖ∙ō■Ėąų¬
║═▀\┐ž─ŻēKĄ─Ę┤üŻ¼īŹĢrš{š¹Ż╗═¼Ģr┐╔└¹ė├┤¾─Żą═▓╗öÓė¢ŠÜ║═Ą³┤·╦ŃĘ©ĪŻ
Ī¶ ▀\┐ž─ŻēKŻ║ÖCŲ„╚╦Ą─╔Ē¾wŻ¼Ė∙ō■ųĖ┴ŅŻ¼ī”ĻP╣ØĄ─┐žųŲ╩Ū║╦ą─Ż¼░³└©ĮŪČ╚Īó┴”Īó╦┘Č╚Ą╚┐žųŲŻ¼ļy³c╩Ū▒Ż│ųäėæB
ŲĮ║ŌĪóąąū▀╠°▄S▒╝┼▄Īó╩ų▓┐ūź╚ĪĄ╚Ż¼ļŖ“īäėĘĮ╩ĮŽ┬ų„ę¬ė╔ļŖÖCĪó£p╦┘Ų„ĪóĮzĖ▄ĪóŠÄ┤aŲ„Ą╚śŗ│╔ĪŻ
Ą┌ę╗┤·FSDąŠŲ¼å╬éĆ╦Ń┴”72tops,CPUū÷┐žųŲ,GPUū÷łDŽ±╠Ä└Ē,NPU×ķ╔±Įø╠Ä└Ēå╬į¬,═Ļ╚½▀mė├ė┌╚╦ą╬ÖCŲ„╚╦;D1ąŠŲ¼32╬╗ĖĪ³cėŗ╦ŃĄ─ūŅ┤¾ąį─▄▀_ĄĮ22.6TFLOPs
┤¾─Żą═╠ß╔²Ę┬šµīW┴Ģ─▄┴”,┐╔┤¾Ę∙╠ß╔²╦ŃĘ©ė¢ŠÜą¦┬╩,┐sČ╠╦ŃĘ©┼cė▓╝■š{š¹Ģrķg,śO┤¾╠ßĖ▀ė¢ŠÜą¦┬╩,┐╔╝ė┐ņ▄ø╝■Ė³ą┬Ą³┤·
╚╦ą╬ÖCŲ„╚╦ōĒėąĖ³Ė▀╝ēĄ─Ėąų¬Į╗╗źŽĄĮy,░³└©é„Ėą─ŻēK║═▄ø╝■ĘĮ├µ,╚╦ą╬ÖCŲ„╚╦▒╚Ę■äšÖCŲ„╚╦Ė³Ė▀,┐┐ļpūŃąąū▀,ī”£p╦┘Ų„žō▌d║═ļŖÖCĒææ¬╦┘Č╚ę¬Ū¾Ė³Ė▀
Š▀╔ĒųŪ─▄┼c┤╣ų▒┤¾─Żą═,╚╦ą╬┼c╦─ūŃĘ┬╔·ÖCŲ„╚╦,╚²ŠSĖąų¬─Żą═║═ČÓ─ŻæBą┼Žó╚┌║Ž,ÖCŲ„╚╦ą┬ą═║╦ą─┴Ń▓┐╝■┼cņ`Ū╔▓┘ū„,─XÖCĮė┐┌,╔·╝ĪļŖę╗¾w╗»┼c╬ó╝{ÖCŲ„╚╦
╠ž╩Ōł÷Š░Ę■ę█ÖCŲ„╚╦╩ŪųĖį┌╠žČ©ŁhŠ│╗“ŪķørŽ┬ł╠ąą╚╬䚥─ÖCŲ„╚╦,į┌Ž¹Ę└Š╚į«,ļŖ┴”┐▒£y,▐rśI,Į©ų■,║╦╣żśI,Ę┤┐ųĘ└▒®,ć°Ę└░▓╚½,┐šķg╠Į£yĄ╚ŅIė“Š▀ėąŠ▐┤¾ąĶŪ¾
╚║¾wÖCŲ„╚╦╝╝ągĄ─æ¬ė├ŅIė“ÅVĘ║,╝»╚║ųŪ─▄ū„×ķ╚╦╣żųŪ─▄Ą─Ęųų¦,īóĄ├ĄĮįĮüĒįĮČÓĄ─æ¬ė├,ėą═¹į┌ÖCŲ„╚╦Ą╚ŅIė“äōįņ│÷ą┬Ą─æ¬ė├║═äōą┬
įŲĘ■äšÖCŲ„╚╦╩ŪųĖīóÖCŲ„╚╦Ą─║╦ą─ėŗ╦Ń║═ųŪ─▄▓┐Ęų▓┐╩į┌įŲČ╦Ę■äšŲ„,įŲČ╦┤¾─X+▒ŠĄžÖC¾wĪ▒╗“Ī░įŲČ╦Ę■äšĪ▒ÖCŲ„╚╦īó│╔×ķęÄ─Ż╗»═ŲÅV┼cæ¬ė├Ą─ųžę¬─Ż╩Įų«ę╗
╩ęā╚╔╠śIĘ■äšÖCŲ„╚╦ų„ę¬æ¬ė├ė┌╩ęā╚ŁhŠ│ųąĄ─ī¦║ĮĘ■äš,╔╠śIŪÕØŹ,▓═’ŗ┼õ╦═,¤o╚╦╩█žø,¤o╚╦▓═ÅdĄ╚Ę■äšł÷Š░;║╦ą─╝╝ąg░³└©ÖCŲ„ęĢėX,╚ßĒśūź╚Ī,╚╦ÖCĮ╗╗ź,ųŪ─▄øQ▓▀┼c┐žųŲĄ╚
┐ĄÅ═ÖCŲ„╚╦æ{ĮĶŽ╚▀MĄ─é„Ėą╝╝ąg║═Š½┤_Ą─▀\äė┐žųŲ;ßt»¤ÖCŲ„╚╦═©▀^ĮY║ŽÖCŲ„╚╦╝╝ąg║═ßt»¤īŻśIų¬ūRŻ¼×ķßt╔·╠ß╣®Ė³Š½┤_ĪóĘĆČ©║═Š½╝ÜĄ─╩ųąg┐žųŲ
═©▀^īó╔·╬’¾wĄ─╔±Įøą┼Žó½@╚Ī,╠Ä└Ē║═é„▀fĄ─ÖCųŲ┼cļŖūė╝╝ągŽÓĮY║Ž,äōįņ│÷Ė³Šo├▄▀BĮė╚╦¾w║═ÖCŲ„Ą─Į╗╗ź─Ż╩Į,▒╗šJ×ķ╩Ū╬┤üĒī”┐╣╚╦¾w╝▓▓ĪĄ─└ĒŽļ╬õŲ„ų«ę╗
ęĢėX,┴”ėXé„ĖąŲ„,Ė▀╦┘/Ė▀╣”┬╩Ą─╬óąĪą═ļŖÖC/ę║ē║“īäėŲ„ū„×ķÖCŲ„╚╦īŹ¼FųŪ─▄╗»,öĄūų╗»,╚ßąį╗»Ą─Ū├ķT┤uŻ¼ųØu│╔×ķą┬ę╗┤·ÖCŲ„╚╦ųžę¬║╦ą─┴Ń▓┐╝■
╚²ŠSĖąų¬─Żą═┼cČÓ─ŻæBą┼Žó╚┌║Ž┼cŠ▀╔ĒųŪ─▄Īó┤╣ų▒┤¾─Żą═Ą─ģf═¼║═╚┌║ŽŻ¼īó▀Mę╗▓ĮöU┤¾ÖCŲ„╚╦æ¬ė├ĘČć·;┐╔┐╦Ę■å╬ę╗é„ĖąŲ„┤µį┌Ą─ŠųŽ▐ąį